|
|
|
I'm interested in computer vision and visual perception. My research path aims towards designing strcutures and imposing constraints that would allow for inferring the relationships between the entities in the physical world and their environment. |
|
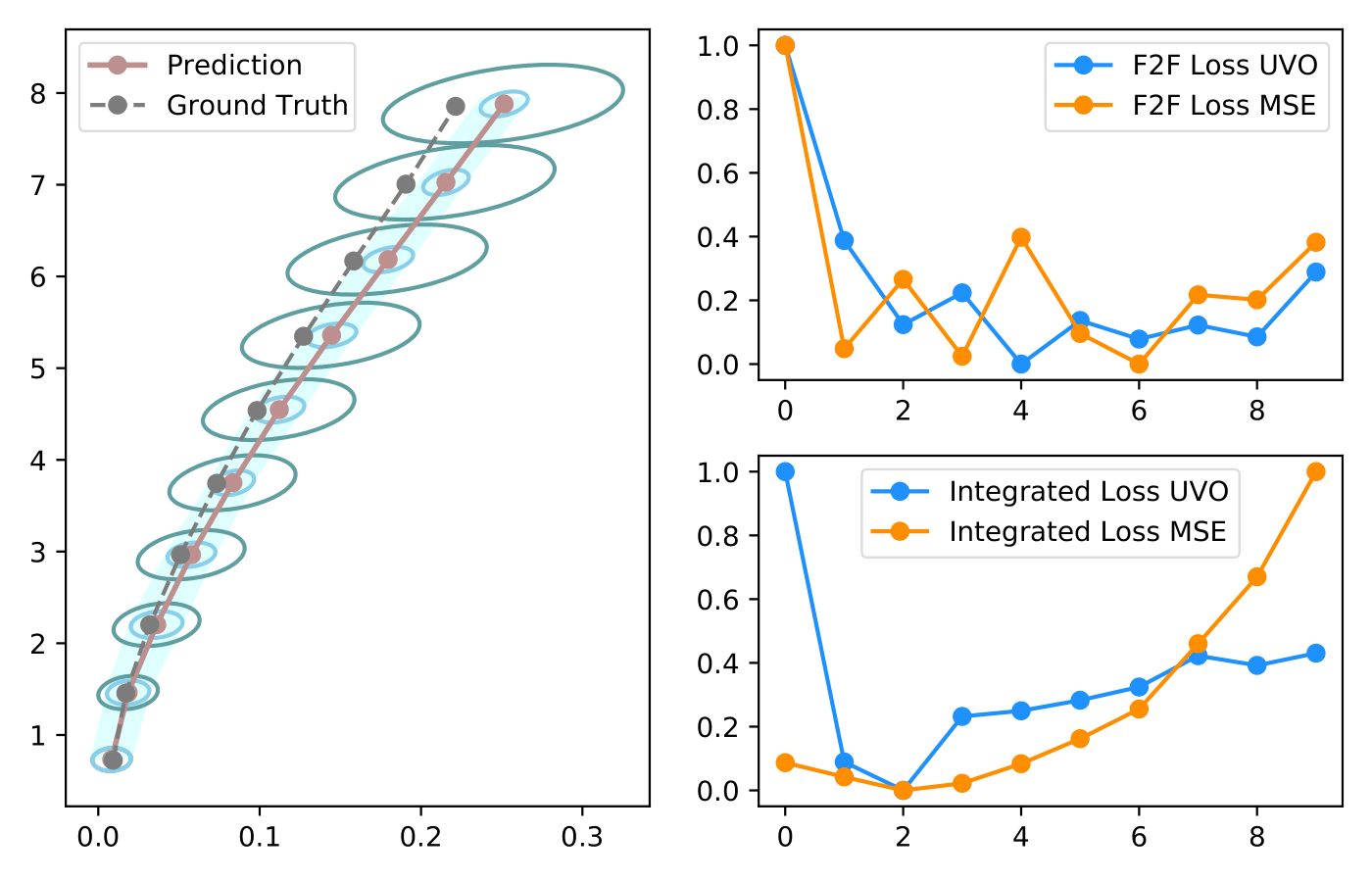
Hamed Damirchi, Rooholla Khorrambakht, Hamid D. Taghirad, Behzad Moshiri ICRA, 2023 arXiv We introduce a consistency-based loss function for deep odometry by compounding the estimated SE(3) pose and uncertainties. The compounded terms are then used in a negative log-likelihood objective function where the precision matrices weighting the global loss term are based on the integrated uncertainty. |
|
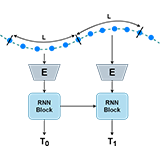
Rooholla Khorrambakht, Hamed Damirchi, Hamid D. Taghirad TinyML, 2022 TinyML arXiv A computationally efficient inertial representation for deep inertial odometry is proposed by replacing the raw IMU data in deep Inertial models with preintegrated features to improve the model’s efficiency. |
|
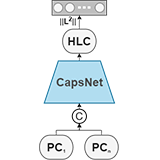
Hamed Damirchi, Rooholla Khorrambakht, Hamid D. Taghirad ICMLA, 2020 arXiv A single CNN encoder is used to extract the features from multiple IMU sensors. These features are used as entities that represent patterns in the input and through dynamic routing, activity of the subject is derived in that window of inputs. By using this architecture, various benefits such as interpretability and robustnetss to noise are gained. |
|
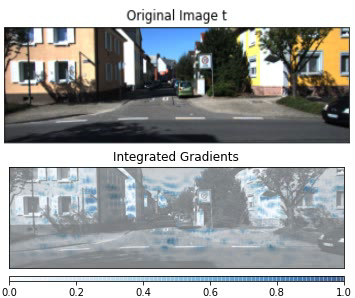
Hamed Damirchi, Rooholla Khorrambakht, Hamid D. Taghirad arXiv, 2020 arXiv We show that common CNN-LSTM architectures fail to extract adequate motion features in the presense of artifacts in the input. Then, by using a single-head spatial self-attention mechanism and without augmentations, we show that the network is able to reject dynamic objects and focus on the background of the scene for better odometry. |
|
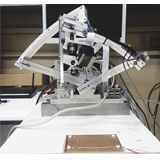
Hamed Damirchi, Rooholla Khorrambakht, Hamid D. Taghirad ICROM, 2019 IEEE In order to be able to collect necessary data for data driven algorithms, we needed a pose estimation framework that would be accurate while providing ground truth at a fairly high frequency. ARAS-IREF is composed of a camera alongside a linux enabled dev board that allows for pose estimation at 100+Hz. |
|
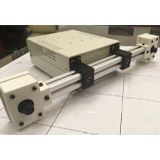
Rooholla Khorrambakht, Hamed Damirchi, Hamid D. Taghirad ICROM, 2019 IEEE An effective framework for calibrating the kinematic parameters of suspended cable driven parallel robots with no requirements for expensive tools and measurement devices is proposed where this algorithm utilizes the existing force sensors in the cable robot to nominate the best set of data for calibration. |
|
The template is from John Barron's rep. |